With the development of industrial intelligence, mechanical arms are widely used in various fields of industry, such as manufacturing. However, mechanical arms have also exposed some unstable factors. Therefore, in order to ensure safety and productivity, condition monitoring of mechanical arm is essential.
In our lab, there are two mechanical arms which composed of manipulator, controller and teaching device. As shown in Fig.1. And its key performance are in Table.1.

Fig.1 Mechanical Arm
Table.1 Performance of Mechanical Arm
| Model | Asage Robots AR5 |
| Load | 5kg |
| Working radius | 815mm |
| Max Speed | 1m/s |
| Repetition Accuracy | ±0.03mm |
| Freedom | 6 |
| Material | Aluminum Alloy, ABS Plastic |
| Dead Weight | 19kg |
| Power | 100-240VAC, 50-60Hz |
The mechanical arm is defined as a reprogrammable multifunctional manipulator designed to move material, parts, tools, or specialized devices through variable programmed motions for the performance of a variety of tasks. The mechanical structure of the mechanical arm is composed of six links and joints. Links are the main bodies that make the mechanism and are connected to each other by joints. The first three joints are responsible for linear motion in space, and the last three joints are responsible for posture change in space. And every joint is composed of driver, motor, reducer and other links, which is shown in Fig.2.
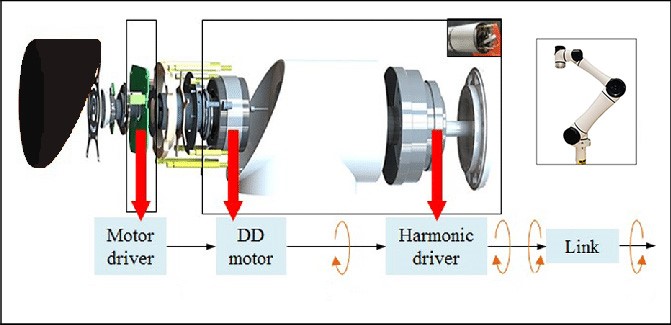
Fig.2 The Structure of Joint
